Here's the result I'm most proud of, because it wasn't designed — it was discovered.
Streaming inference was built in January: a sampler that sends each posterior draw as a BEAM message, so a Scenic visualization window can update trace plots in real time. Distribution was built in February: four Erlang nodes, each running an independent chain, collecting samples through :erpc.
The two features were developed months apart. Neither knew the other existed. When we connected them, the change was three lines of code. The distributed coordinator already forwarded messages to a caller PID. The streaming visualization already listened on a PID for sample messages. We pointed one at the other.
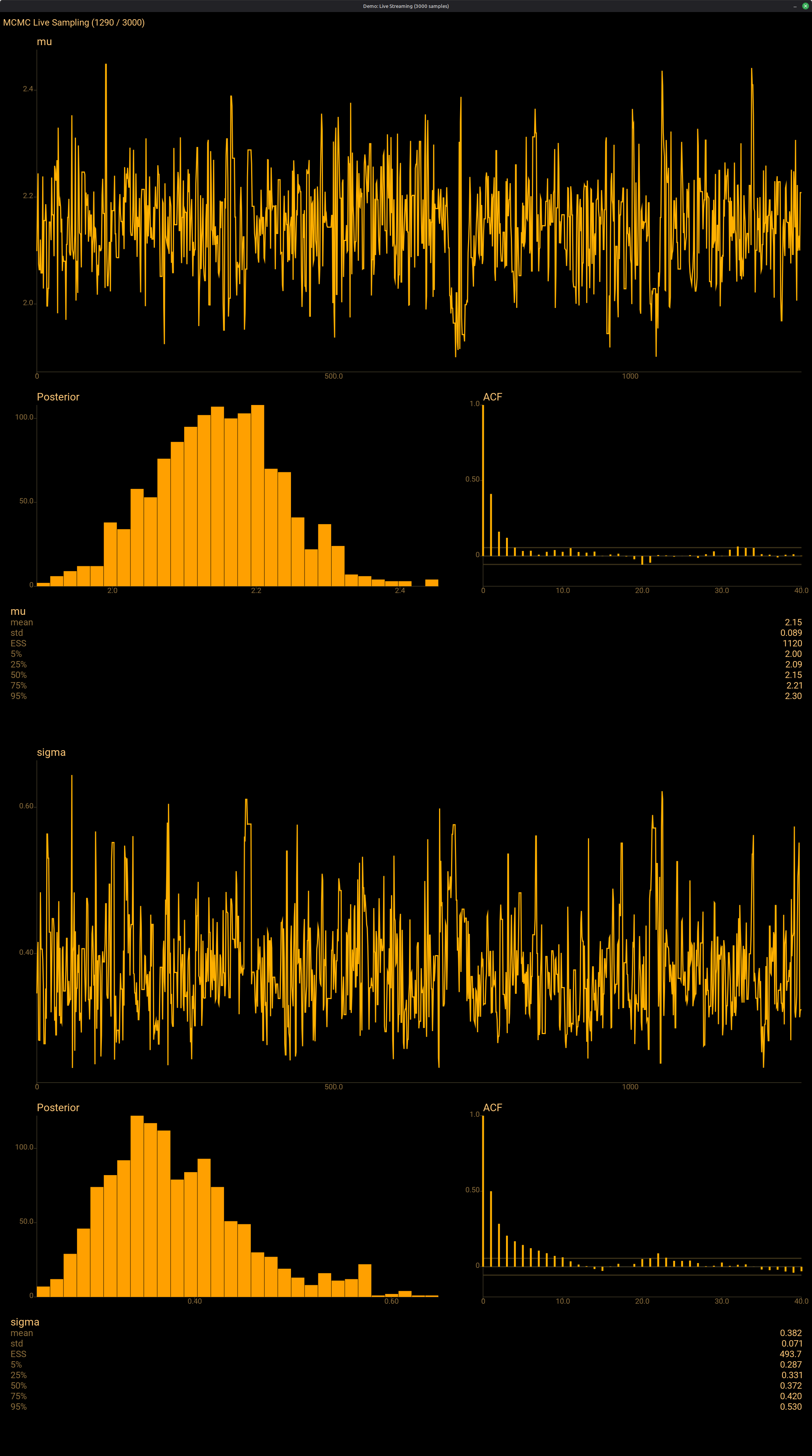
Four nodes. Twenty thousand samples. Twenty-one seconds. The Scenic dashboard updated live from all four nodes simultaneously — trace plots interleaving draws from four independent chains running on four separate machines.
This composition worked on the first attempt because both features were built on the same primitive: send(pid, {:exmc_sample, i, point_map, step_stat}).